車載高精定位技術的三大發展趨勢
隨著自動駕駛、智能交通系統等領域的快速發展,車載高精定位技術作為其中的核心支撐技術,正日益受到廣泛關注。高精度定位不僅保障了車輛的準確導航,還為行車安全、路徑規劃和車聯網應用提供了堅實基礎。結合計算機信息科技領域的技術開發進展,車載高精定位技術呈現出以下三大發展趨勢。
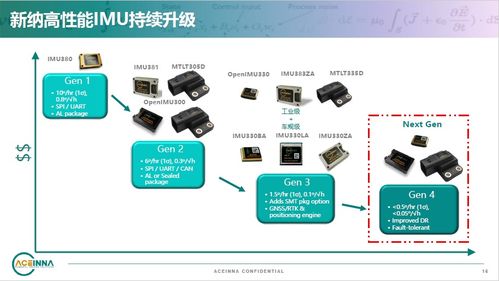
多傳感器融合技術成為主流。傳統單一的全球導航衛星系統(GNSS)在復雜城市環境中易受信號遮擋和多路徑效應干擾,導致定位精度下降。通過融合慣性測量單元(IMU)、激光雷達(LiDAR)、攝像頭和毫米波雷達等多種傳感器數據,可利用計算機算法進行數據互補與優化。例如,卡爾曼濾波和機器學習方法能夠實時校正定位誤差,提高在隧道、高架橋等場景下的定位穩定性。這一趨勢得益于嵌入式系統和邊緣計算的發展,使得多源數據處理在車載平臺上高效運行。
高精度地圖與實時定位的結合日益緊密。高精地圖不僅包含道路的幾何信息,還集成了車道線、交通標志等語義數據,為車輛定位提供先驗知識。通過將實時傳感器數據與高精地圖進行匹配,車輛可以厘米級精度確定自身位置。計算機視覺和SLAM(同步定位與地圖構建)技術的進步,使得車輛能夠在未知或動態環境中實現自主定位與地圖更新。同時,云計算和5G通信技術的應用,支持高精地圖的在線更新與共享,進一步提升了定位的可靠性和實時性。
第三,人工智能與大數據驅動定位算法優化。隨著深度學習等AI技術的成熟,車載定位系統能夠從海量行車數據中學習復雜環境模式,進而預測和補償定位偏差。例如,卷積神經網絡(CNN)可用于處理攝像頭圖像,識別道路特征以輔助定位;遞歸神經網絡(RNN)則能分析時間序列數據,改善動態環境下的定位連續性。大數據平臺還支持對歷史定位數據進行挖掘,優化算法參數,并通過OTA(空中下載)技術實現系統遠程升級。這一趨勢不僅提升了定位精度,還降低了系統對硬件傳感器的依賴,推動了成本控制與規模化應用。
車載高精定位技術正朝著多傳感器融合、高精地圖集成和AI算法優化三大方向快速發展。這些趨勢深度融合了計算機信息科技的前沿成果,如邊緣計算、5G通信和機器學習,為智能交通和自動駕駛的普及奠定了技術基礎。未來,隨著相關技術的進一步成熟,車載高精定位將實現更高精度、更強魯棒性和更廣應用場景,推動整個汽車產業向智能化、網聯化方向邁進。
如若轉載,請注明出處:http://m.hqpfw.cn/product/29.html
更新時間:2026-01-08 00:33:29